Drehscheibenumbau auf Schrittmotor
Vorgeschichte
Im H0- bzw. N-Bereich kennen die allermeisten sicherlich die Drehscheiben aus dem Hause Fleischmann bzw. Märklin und damit auch den beiliegenden Drehscheiben-Schalter, der meist bei analogen oder manuell gesteuerten Modellbahnanlagen zum Einsatz kommt. Auch brauche ich vermutlich niemanden erzählen, dass der original verbaute Antrieb nicht gerade der leiseste ist, wobei das einem einfachen "Spielbetrieb" keinen Abbruch tut.
Dennoch machte ich mir 2011 schon Gedanken um eine Drehscheibenunterstützung in meiner eigenen Modellbahnsteuerungssoftware, sodass man auf PC-gesteuerten Anlagen einem Bahnbetriebswerk etwas mehr Leben einhauchen kann.
Zunächst entschied ich mich eine Fleischmann H0-Drehscheibe 6052 mittels Littfinski Drehscheibendecoder TT-DEC auszustatten und damit die ersten Gehversuche zu wagen. Bis dato hatte ich mit Littfinski Produkten wenig Probleme, doch so richtig warm wurde ich mit dem Drehscheibendecoder nicht. Auch wenn ich mich strickt an die Anleitung gehalten habe, verzählte sich der Decoder im Testbetrieb ab und zu und so stand die Bühne teils nicht mehr am richtigen Gleisabgang. Die Steuerungssoftware kann zwar über einen Rückmelder erfahren, wann der Decoder eine Bewegung abgeschlossen hat, an welcher Position die Bühne dann jedoch steht (wenn es bei der Drehung evt. ein Problem gab) ist nicht ermittelbar und so landete die ein oder andere Lok bei den Tests schonmal in der Grube. Sicherlich kann der Decoder nichts dafür, wenn z.B. der Motor schwergängig ist. Die Drehscheibe habe ich auch mehrfach zerlegt und die Motoreinheit komplett gereinigt und geölt, doch die Probleme blieben. Es verging etwas Zeit als ich mich 2013 mit einer Fleischmann N-Drehscheibe 9152 nochmal ans Werk machte, wobei ich auch hier mit dem o.g. Drehscheibendecoder ähnliche Probleme hatte.
Auf der Suche nach Alternativen bin ich später auf den Drehscheibendekoder von Sven Brandt (kurz DSD2010) gestoßen, bei dem kurzgefasst eine Gruben- und Bühnenplatine zum Einsatz kommt und mit einem optischen Sensor und einer Reflektor-Scheibe die Drehung überwacht wird. Da ich mich zum damaligen Zeitpunkt bereits mit bidirektionalen Bussystemen und anderen Motoren beschäftigt hatte, legte ich das Thema aber auch erstmal wieder auf Eis, weil ich das damit hätte nicht umsetzen können.
Lösung mittels Schrittmotor
Mit einem ersten Hardware-Prototypen kam ich ca. 2016-2017 in Berührung, mit dem es möglich war eine Drehscheibe per Schrittmotor zu betreiben, wobei ein Motortreiber verwendet wird, der das sogenannte Microstepping unterstützt.
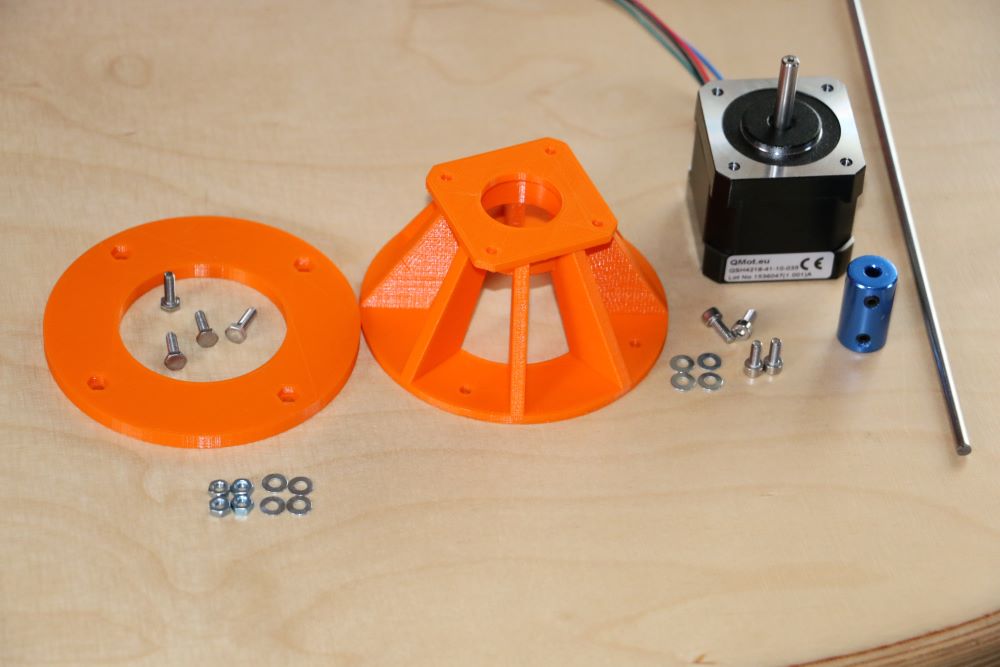
Deshalb konstruierte ich für meine H0- und N-Drehscheibe zum damaligen Zeitpunkt diese hier gezeigte Motorhalterung für einen Nema 17 Schrittmotor.
Neben der eigentlichen Motorhalterung ist links im Bild noch eine Adapterplatte zu sehen, die sich je nach N- bzw. H0-Drehscheibe minimal unterscheidet. Der Motorhalter ist absolut identisch. Ich selbst habe eine Fleischmann H0-Drehscheibe 6052 und N-Drehscheibe 9152 umgebaut. Es gibt auch schon Tester, die eine Märklin Drehscheibe oder anderweitige Fleischmann Drehscheiben umgebaut haben, da diese i.d.R. von der Grube identisch sind.
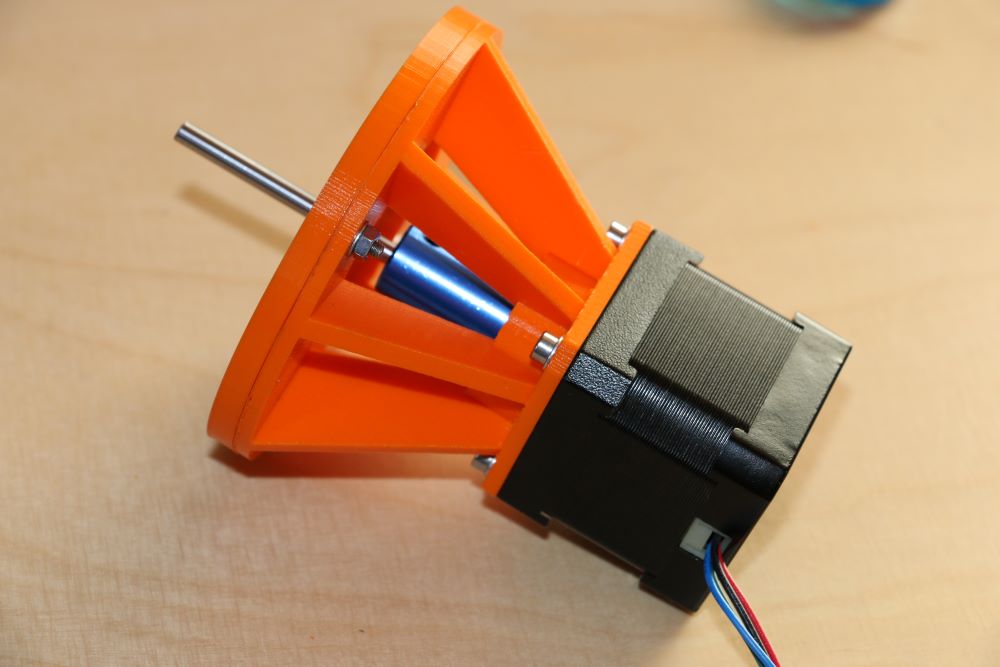
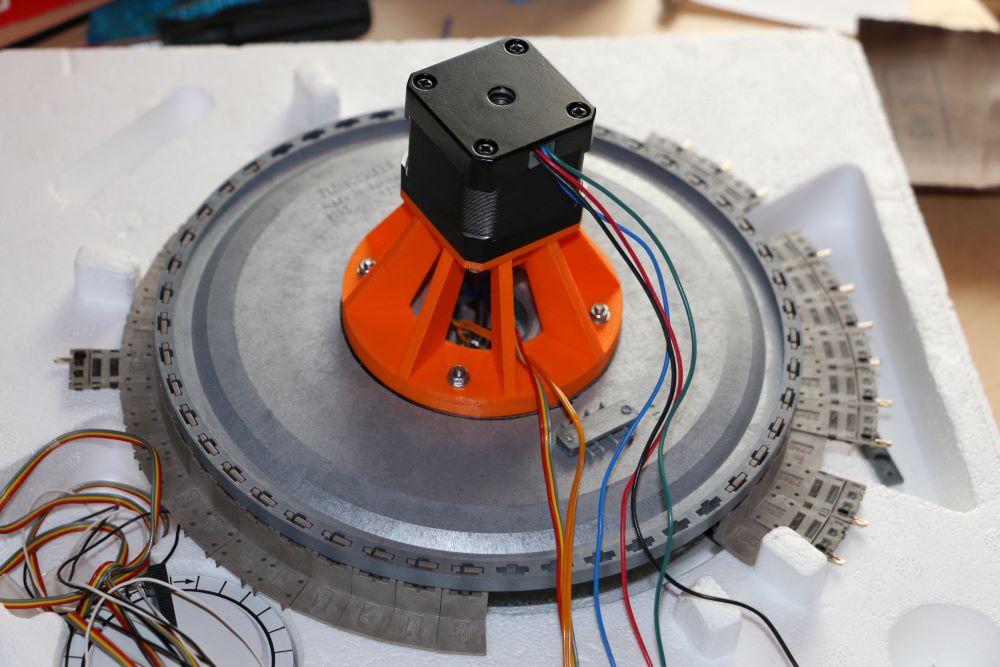
Bei der Drehscheibe wird die Bühne herausgenommen und der Zentrumsbolzen ausgebaut. Danach lässt sich von unten die hier provisorisch eingespannte Welle der Motorhalterung von unten durch das zentrale Grubenloch stecken. Die Adapterplatte liegt somit auf der Grubenunterseite auf und wird verklebt. Der Motorhalter lässt sich mit 4 Schrauben später jederzeit abnehmen.
Bei der Bühne wird mittig eine Welle verklebt, sodass diese dann mit der Wellenkupplung am Schrittmotor befestigt werden kann.
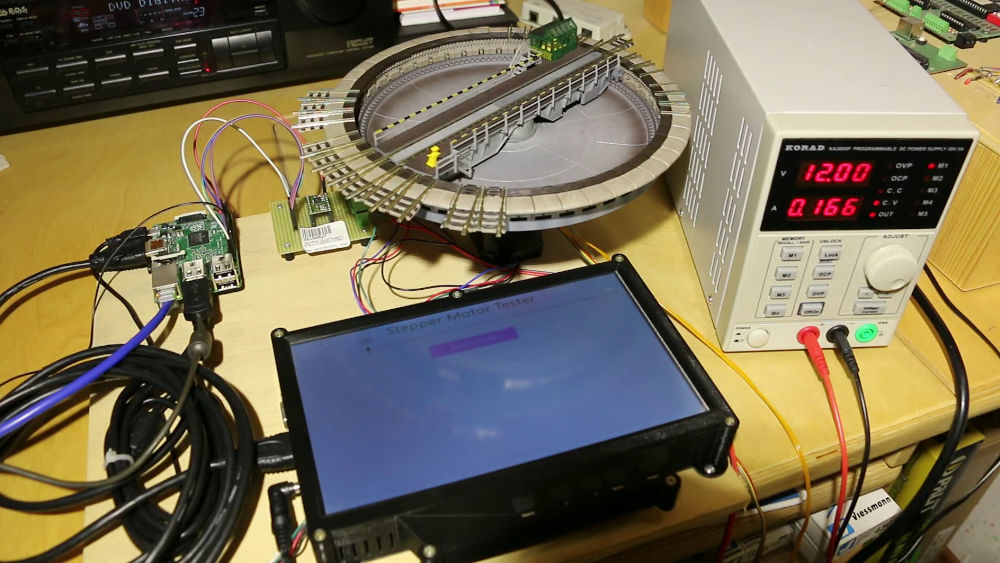
Um die Bühnendrehung unabhängig von der damals noch in den Anfängen befindlichen Modellbahn-Elektronik zu testen, hatte ich mich entschlossen einen sogenannten SilentStepStick mit TMC2130 Schrittmotortreiber an einem Raspberry Pi anzuschließen. Unabhängig davon wollte ich kurz die App-Entwicklung für Windows IoT Core ausprobieren und habe eine sehr simple App "Stepper Motor Tester" aufgespielt, sodass ich die Drehung über einen Touchscreen steuern konnte.
Ich verwende aktuell nur noch Schrittmotoren mit 400 Schritten (0,9°). Durch das Microstepping vom TMC2130 wird vereinfacht gesagt ein Vollschritt in dutzende kleine Mikroschritte unterteilt (z.B. 32, 64, 128, 256). Damit ergeben sich pro Umdrehung je nach Einstellung z.B. 25600 Schritte (400*64).
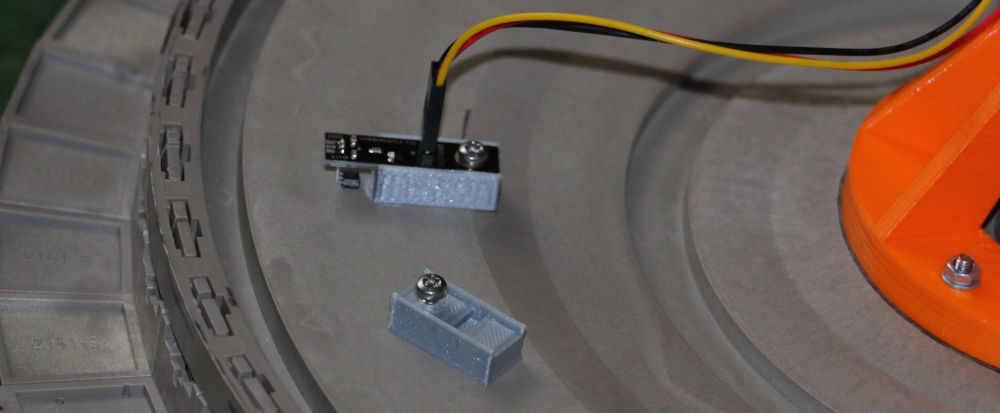
Mit einem Magneten unterhalb der Bühne und einem TLE4905 Hallsensor unterhalb der Grube kann später eine Referenzfahrt (Homing) durchgeführt werden, was z.B. wichtig ist, wenn die Modellbahnanlage eingeschaltet wird.
Umbauvideo
Während des Umbaus habe ich bereits 2017 und auch bei der Inbetriebnahme 2020 in Verbindung mit der Modellbahn-Elektronik diverse Videosequenzen gedreht.
Auch wenn im Zusammenschnitt nicht alles auf dem neusten Stand ist, zeigt dieser dennoch, wie der Umbau erfolgen kann.
Prinzipiell ist der Umbau noch genauso, wobei mittlerweile eine Messingwelle mit gefräster und verlöteter Messingplatte verwendet wird, die besser verklebt werden kann. Es ist nach dem Umbau darauf zu achten, dass sich die Bühne mit einem Finger leichtgängig drehen lässt. Da Fleischmann unter der Bühne mit Kunststoffrädern arbeitet und in der Grube das Gleisprofil ebenso aus Kunststoff besteht, kann man bei zu großer Reibung gegebenenfalls die Wellenkupplung nochmal leicht lösen, die Bühne minimal nach oben ziehen und die Wellenkupplung wieder festziehen.
Drehscheibendecoder für Schrittmotoren
Bei diesem Direktantrieb der Bühne ist es wichtig, dass der Schrittmotor im Mikroschrittbetrieb angesteuert wird.
Dazu gibt es folgende Drehscheibendecoder, die ich getestet habe und jeweils auf einer separaten Seite beschreibe.
- StepControl von Fichtelbahn als BiDiB-Knoten
- LocoTurn von Hardi & domapi als DCC-Drehscheibendecoder
Es gibt auch versierte Anwender mit entsprechenden Kenntnissen in der Hardware- und Software-Entwicklung, die sich eigene Schaltungen aufgebaut und programmiert haben.
FAQ
Per E-Mail erhalte ich immer wieder vorab Fragen, sodass ich versuche diese hier direkt zu beantworten. Hier folgen ein paar Fragen von Interessenten, sowie meine Antworten darauf.
-
Kann das überhaupt funktionieren, weil der Schrittmotor viel zu wenig Schritte hat!? In den Videoausschnitten wurde doch bestimmt getrixt, oder?
Ich habe Schrittmotoren mit 0,9° (400 Schritte). Wenn man davon ausgeht, dass z.B. die H0-Bühne ca. 31 cm lang ist, dann ergibt das einen Umfang von 97,39 cm (31 cm * Pi). Bei 0,9° mit den 400 Schritten ergibt das wiederum pro Schritt 2,43 mm (97,39 cm / 400). Würde man eine Drehscheibe direkt damit ansteuern, wäre diese Auflösung zu grob und deshalb benötigt man eine Untersetzung. Das kann man z.B. mittels Planetengetriebe oder Schneckengetriebe machen. Das führt aber teils zu hohem Spiel, was die Steuerung ausgleichen muss und mir auch einige leitgeplagte Personen per E-Mail berichtet haben, dass das bei deren Steuerungen nicht gut funktioniert hat. Bei der hier vorgestellten Lösung mit dem Direktantrieb ohne Getriebe werden Steuerungen verwendet, die den Mikroschrittbetrieb (Microstepping) ermöglichen, also ein Motorschritt elektronisch in Mikroschritte unterteilt wird. Aus einem Schritt werden dann z.B. 16, 32, 64, ... bzw. je nach Steuerung bis zu 256 Mikroschritte. Geht man z.B. theoretisch von 16 Mikroschritten aus, dann ergibt das 97,39 cm / (400 * 16) = 0,15 mm. Mikroschritte sind natürlich auch nicht das Allerheilmittel und man sollte das nicht auf die Kommastelle genau nehmen, jedoch konnte ich damit bei meiner N- und H0-Drehscheibe bisher gute Resultate erzielen.
Wichtig bei all diesen Antriebsarten ist, dass sich die Bühne leichtgängig drehen muss, also wenig Reibung hat und an keiner Stelle etwas klemmt, was auch beim Einbau in der Anlage beachtet werden muss (massive und gerade Unterkonstruktion). Andererseits kommt es zu ruckeligen Bewegungen. Leider gibt es gebrauchte Drehscheiben, die total verzogen sind und selbst mit dem originalen Antrieb schon klemmen (davon besser die Finger beim Kauf eines vermeintlichen Schnäppchens lassen).
-
Lässt sich diese Lösung mit klassischen Drehscheibendecodern ansteuern (z.B. LDT TT-DEC)?
Nein, für einen Schrittmotor benötigt man einen speziellen Decoder, der solche Schritttmotoren ansteuern kann.
-
Kann ich die 3D-Druck-Daten erhalten?
Aufgrund der Druckversuche und der vielen Tests, möchte ich meine 3D-Druck-Daten für dieses Projekt nicht kostenlos zur Verfügung stellen.
Wer Interesse hat seine Drehscheibe umzubauen, kann den Umbausatz bei mir erwerben (Infos siehe unten). -
Was kostet der Umbausatz und was ist dabei?
Zur Befestigung eines Schrittmotors an der Drehscheibengrube biete ich folgendes Set für 68€ an (ohne Schrittmotor).
Enthalten sind alle nötigen Schrauben, Muttern, U-Scheiben und eine Wellenkupplung (5mm auf 4mm).
Die Halterung ist von mir i.d.R. schon vormontiert, weil ich nach dem Druck die Halterung entsprechend nachbearbeite und teste, dass soweit alles in Ordnung ist und sich später ein NEMA 17 Schrittmotor problemlos anschrauben lässt.Bei meinen Drehscheiben nutze ich eine 4mm Messingwelle mit gefräster Messingplatte, die man mit der Bühne verklebt.
Da ich gefragt wurde, ob ich auch sowas anbieten könnte, kann dies optional für 8€ erworben werden (fertig verlötet).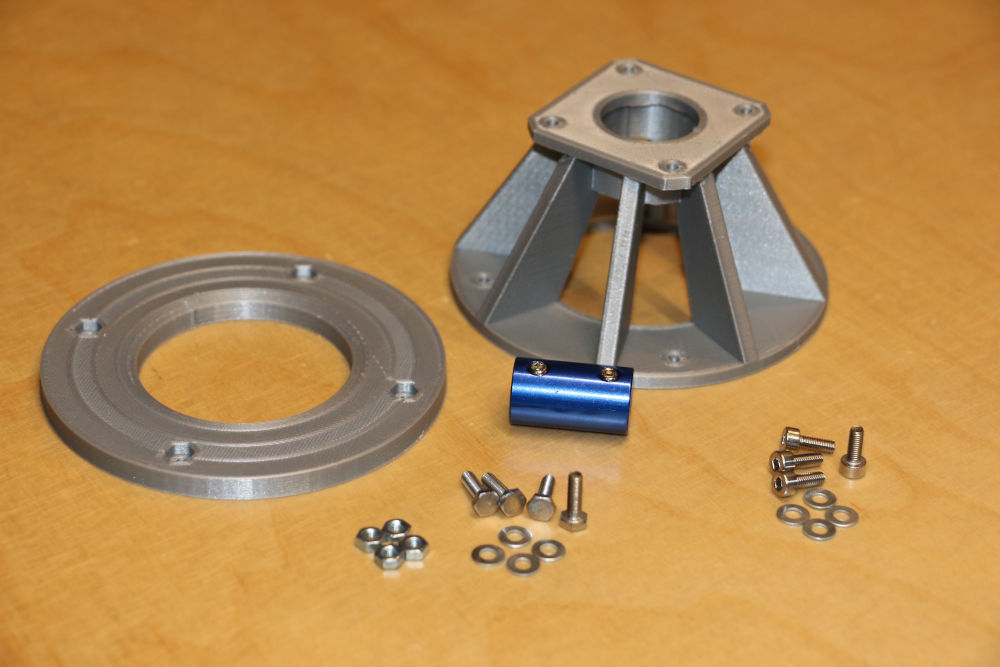

Wer eine Fichtelbahn Sensor-Platine TLE4905 (Hallsensor) einsetzen möchte, der kann bei der Bestellung eines Umbausets noch eine kostenlose TLE4905-Halterung inkl. Schraube bekommen.
Auf Wunsch der Anwender lege ich mittlerweile ebenfalls kostenlos einen passenden Neodym-Magneten bei.
-
Wie sind die Lieferzeiten?
Ich betreibe Modellbau/Modellbahn rein als Hobby und gehe einen ganz normalen Beruf nach, sodass ich nicht immer täglich reagieren kann.
Ein paar wenige Exemplare liegen ausgedruckt bereit und drucken kann ich jederzeit wieder. Anderenfalls werde ich diesbzgl. entsprechend informieren. -
Wie kann ich bestellen, welche Versandkosten fallen an und erhalte ich eine Rechnung?
Einen Shop betreibe ich derzeit nicht. Bitte einfach per E-mail über das Kontaktformular bestellen bzw. darüber auch gerne vorab noch Fragen stellen, wenn etwas unklar sein sollte.
Bei einer Bestellung möglichst folgende Angaben dazuschreiben:
- Für welche Spurweite/Nenngröße bzw. Fleischmann-Drehscheibe benötigen Sie das Umbauset? H0 oder N?
- Möchten Sie die Messingwelle mit gefräster und verlöteter Messingplatte mitbestellen?
- Benötigen Sie eine Halterung für die Fichtelbahn Sensor-Platine TLE4905?
Ich versende i.d.R. per Hermes S-Paket (Hermes Preisangabe April 2025: 5,49 €) und gebe die Versandkosten 1:1 weiter.
Bei einer Bestellung erhalten Sie von mir eine Rechnung (Vorkasse). Als Kleinunternehmer im Sinne von § 19 Abs. 1 Umsatzsteuergesetz (UStG) wird Umsatzsteuer nicht berechnet.
-
Wie kompliziert ist der Umbau?
Der Umbausatz besteht nur aus wenigen Komponenten und ist teils schon vormontiert.
Etwas handwerkliches Geschick ist natürlich Grundvorraussetzung und von kleineren Nacharbeiten sollte man sich nicht abschrecken lassen (Vorgehen bitte aus dem Video entnehmen). -
Erlischt die Garantie der Drehscheibe?
Da hier Änderungen an der Fleischmann/Märklin-Drehscheibe vorgenommen werden und u.a. auch der original Antrieb entfernt wird, sollte bei neu angeschaften Drehscheiben davon ausgegangen werden, dass die Garantie seitens des Herstellers erlischt. I.d.R. werden aber ohnehin meist Drehscheiben umgebaut, die gebraucht bzw. Jahre alt sind.
-
Was für ein Kunststoff wird hier eingesetzt?
Ich verwende für meinen FDM-Drucker ganz normalen PLA-Kunststoff, wobei ich hier qualitativ hochwertiges PLA-Filament von BASF einsetze.
An dieser Stelle sei erwähnt, dass PLA bis bis ca. 60 °C wärmeformbeständig ist. Darüber hinaus sollte man Temperaturen vermeiden. -
Welchen Klebstoff sollte man verwenden?
Mittlerweile verwende ich für diesen Anwendungsbereich nur noch 2K Epoxykleber.
Ich hatte 2017 Jamara Epoxi-Rapid verwendet, später auch Toolcraft 1347649.
Ein Anwender hat zuletzt mit UHU Plus Schnellfest (35g Tube) ebenfalls gute Erfahrungen gemacht. -
Wo platziert man am besten den Hallsensor und den Magneten?
Dafür gibt es eigentlich keine genau Vorschrift, wobei man beides möglichst weit außen platzieren sollte, da der Umfang dort größer und das bzgl. der Genauigkeit besser ist (nahe an der Drehachse/Welle ist ungünstig).
Bei der Fleischmann H0-Drehscheibe zeige ich im o.g. Video bei ca. 17:50 die Position des Magnets, sowie der Halterung mit der Fichtelbahn Sensor-Platine TLE4905.
Bei der Fleischmann N-Drehscheibe kann der Magnet wie folgt platziert werden und der TLE4905 Hallsensor entsprechend unter der Grube. Wer eine Fichtelbahn Sensor-Platine benutzt, der hat hierbei gleich noch eine LED auf der Platine.
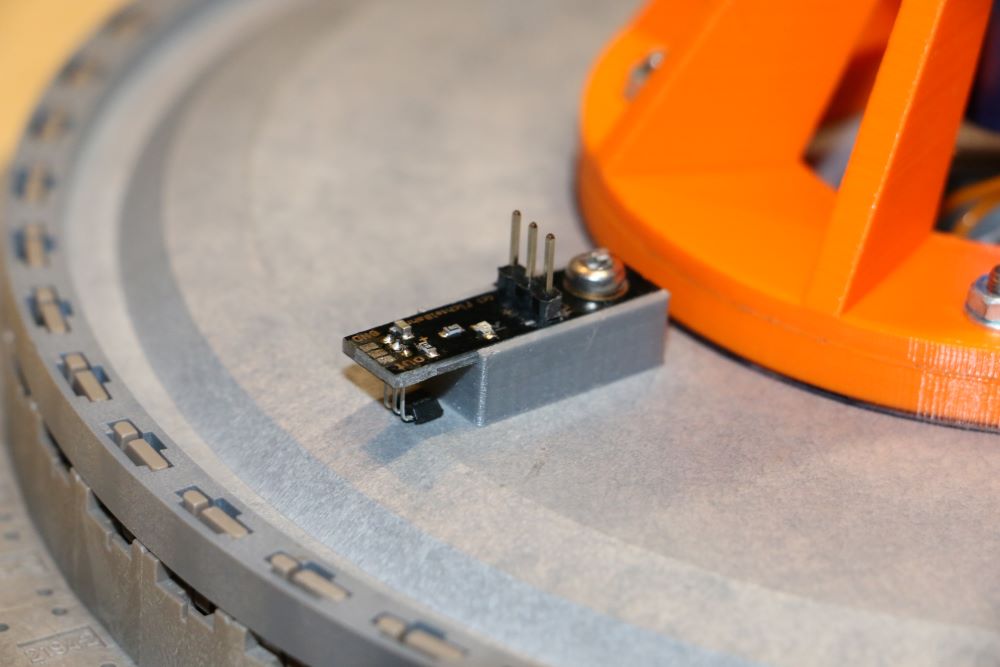
Bei anderen/eigenen Steuerungen kann der Hallsensor (z.B. TLE4905) auch direkt unter die Grube geklebt und entsprechend verkabelt werden. Das ist letztendlich projektabhängig.
-
Gibt es eine Variante mit Untersetzung?
Teils habe ich über eine kompatible Erweiterung meiner Halterung um einen Riemenantrieb nachgedacht, sodass die 400 Motorschritte nochmal zuvor mechanisch untersetzt werden. Das ist theoretisch machbar, aber das würde aufwändiger und teurer werden, weil dafür eine angepasste Halterung, Riemenscheiben, mehrere Lager nötig sind und dafür gesorgt werden muss, dass der Riemen immer gut gespannt ist. Sobald der Riemen minimal locker wird, kommt wieder Spiel hinzu. Langlöcher zum Riemenspannen reichen deshalb als Dauerlösung nicht, da bräuchte man z.B. einen Riemenspanner. Zu ruckeligen Bewegungen kommt es hier auch, wenn die Bühne an gewissen Stellen hakt oder nicht leichtgängig dreht, was mir ein Tester mit Eigenkonstruktion geschildert hat.